Les capteurs sont des modules, qui peuvent s'ajouter au robot comme sur notre NXT avec des simples cables, ils servent surtout au robot à percevoir son environnement, ils sont donc necessaires au déplacement du robot.
Cependant, il existe de nombreux capteurs avec tous une fonction différente, c’est pourquoi nous citerons ici seulement les capteurs les plus utilisés dans la robotique, et plus précisément dans le déplacement et le repérage dans l'espace.
1) Le capteur infrarouge.
Ce capteur permet aux robots de détecter des obstacles et de mesurer la distance qui les sépare.
Le capteur infrarouge est composé d’un récepteur qui détecte l’intensité lumineuse dans la gamme des infrarouges (>780nm) et d’un émetteur de lumière infrarouge. Ce capteur peut remplir trois fonctions :
- Capteur de contact : On réalise une mesure avec l’émetteur éteint et une autre avec l’émetteur en fonctionnement. S’il n’y a aucun écart de mesure, alors il n’y a pas d’obstacles. Or, s’il y a un obstacle, celui-ci va réfléchir des infrarouges reçus et donc il y aura un écart entre les deux mesures. Ce qui permettra au robot de savoir si oui ou non il y a un obstacle à proximité.
- Capteur de distance : On réalise cette fois la mesure de l’angle du rayon infrarouge qui arrive sur le récepteur. Par rapport à la distance Émetteur/Récepteur, on peut calculer la distance de l’obstacle.
- Suivi d’une ligne noire : Le capteur peut aussi être utilisé pour suivre une ligne noire sur fond blanc (ou l’inverse) car le noir réfléchit plus la lumière IR que le blanc. Le robot pourra savoir alors, avec les écarts de réception de la lumière, s’il est toujours sur la ligne blanche ou sur la ligne noire.
Pour finir, le capteur infrarouge est un des plus utilisés des capteurs dans la robotique. Mais il a des inconvénients, par exemple si on le compare avec le capteur ultrasons, le capteur IR permettra une meilleure précision mais une plus basse portée et un cône de détection réduit. De plus, il est sensible à la couleur et à la nature des obstacles, du fait que certaines couleurs ou certains matériaux agissent différemment par rapports à la réflexion des infrarouges.
2) Le capteur ultrasons.
Ce capteur fournit la distance entre lui et les obstacles autour de lui. Son fonctionnement est similaire à celui du capteur infrarouge :
Il est aussi composé d'un émetteur et d'un récepteur, mais au lieu d'envoyer et de recevoir des lumières infrarouges, celui-ci va recevoir des ultrasons (Vibration de même nature que le son, mais de fréquence trop élevée (plus de 20 kHz à plusieurs centaines de mégahertz) pour que l'oreille humaine puisse la percevoir. Source : Dictionnaire Larousse)
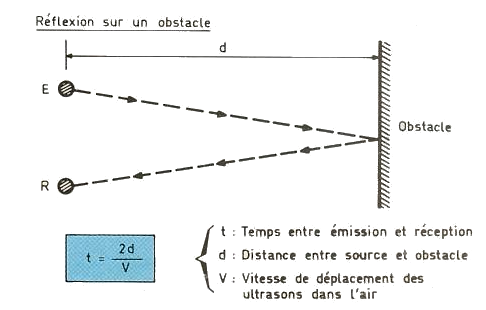
En connaissant la vitesse des ultrasons dans le milieu concerné (le capteur situé sur notre robot par exemple, considère que la vitesse des ultrasons est de 341 m/s) et le temps entre l'émissions et la réception, nous pouvons calculer la distance entre le robot et l'obstacle.

-
Cône de détection :
En plus de ça, ce capteur peut détecter des obstacles qui ne sont pas exactement devant lui, on appelle cela le cône de détection (ce procédé est aussi présent sur le capteur infrarouge utilisé comme capteur de distance).

Cette fonctionnalité est un avantage car le capteur possède un champ de détection plus grand qu'un capteur plus précis, et pourra détecter des objets relativement fin comme des pieds de table, obstacles qui ne pourront pas être détectés par des télémètres (objet de mesure permettant de calculer la distance d'un objet lointain) avec un champ de détection plus petit. Mais cela reste un inconvénient car même si on connaît la distance entre l'obstacle et le capteur, on ne sait pas où exactement il se situe dans le cône de détection.
-
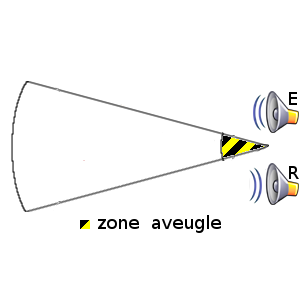
Qu'est-ce que la zone aveugle ?
La zone aveugle est une partie du cône où les capteurs ne peuvent détecter d'obstacles. Cela est dû à l'arrêt du récepteur après l'émission d'ultrasons. En effet, le récepteur est désactivé pendant un court instant après l'émission de l'onde. Sinon, du fait de la proximité du récepteur et de l'émetteur, la distance serait faussée.
-
Quelques paramètres importants pour le fonctionnement du capteur
Puissance de l'émission.
Cela correspond à la puissance de l'émetteur à envoyer des ultrasons, mais cette puissance est limitée. Elle dépend de la tension d'alimentation du NXT pour notre cas. C'est pour ce cas que lorsque la batterie du robot est déchargé, la tension fournie est plus faible, et donc l'émetteur d'ultrasons émettra moins loin ce qui réduit la portée du capteur.
Sensibilité de réception.
C'est le capacité du récepteur à détecter des ultrasons très faibles. Tout comme nous, grâce à nos oreilles, où nous pouvons entendre plus ou moins bien les sons. Le récepteur de notre capteur ne peut pas recevoir des ondes ultra-sonores trop faibles. Ce qui influe la portée du capteur d'ultrasons.
La taille de la surface.
Pour être détecter le plus loin possible, un objet doit renvoyer le plus d'ultrasons au recepteur. Car si l'onde ultra-sonore en retour est trop faible, elle ne pourra pas être détectée par le récepteur à cause de sa sensibilité insuffisante.
Donc, plus la surface est grande, plus elle renverra des ondes vers le capteur; et plus la surface est petite, moins elle renverra des ondes vers le capteur. C'est pour cela qu'un mur sera détecter plus loin qu'un objet plus petit.
La forme de l'objet.
La forme de l'objet est un paramètre autant important que les autres. En effet, un objet bien plat et perpendiculaire au capteur renverra toute l'onde en retour, ce qui aidera sa détection.
Alors qu'un objet arrondie comme une balle renverra des ondes dans toutes les directions, et seulement une partie de ces ondes seront détecter par le recepteur du capteur.
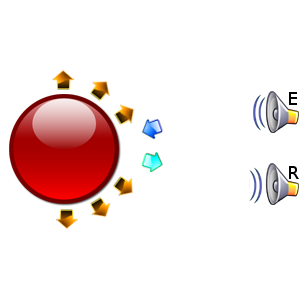
La flèche bleu étant l'onde émise par l'émetteur du capteur d'ultrasons et la flèche verte la petite partie de cette même onde renvoyée vers le récepteur du capteur d'ultrasons. Les autres flèches représentant les parties de l'onde émissent dans plusieurs autres directions et qui ne seront pas reçus par le récepteur.
La texture de l'objet.
On notera ici qu'un objet en caoutchouc et qu'un objet en metal sera plus ou moins détecter en ce qui concerne leur distance avec le capteur, du fait de leur absorbtion d'ondes utra-sonores.
3) Le capteur tactile.
Le capteur tactile est le capteur le plus utilisé dans la robotique, et un des premiers, c'est le capteur universel. Il donne au robot le sens du toucher car il détecte s'il est enfoncé ou relâché.
Il peut être utilisé dans différents cas : détection d'obstacle, détection de l'élongation maximale d'un bras robotique ou même servir comme bouton de commande étant donné que ce capteur est un simple bouton poussoir.
Son fonctionnement est simple, le capteur posséde 2 états : enfoncé ou relâché. A partir de là, par rapport à la fonction du capteur dans le programme, le robot peut par exemple savoir s'il est en contact avec un objet ou non.
4) Le capteur de luminosité.
Ce capteur sert principalement à s'orienter au sol, par exemple par un suivi de ligne, ou dans notre cas, lorsque la couleur du sol change de blanc à noir, le robot détecte ce changement et continue le programme souhaité.
Mode lampe de couleur.
Notre capteur possède une DEL de couleur rouge. Ce mode permet juste d'allumer ou d'éteindre cette DEL.
Mode capteur de luminosité.
Le capteur, en plus de la DEL rouge, est composé d'un détecteur lui permettant de connaître l'intensité de la lumière qu'il capte. Que ce soit la lumière ambiante ou que ce soit la lumière de sa lampe réfléchie par une surface. Plus le capteur recevra de la lumière, plus la valeur numérique envoyé au NXT sera grande, cette valeur varie entre 0 et 100.